Run a MuSHR simulation with the MuJoCo physics engine.
Beginner Tutorial | Expected duration is 30 minutes
By: Caelen Wang
Introduction
Goal
This tutorial will introduce you to the MuSHR MuJoCo simulation. MuJoCo is a physics engine that provides accurate simulations for real-world interactions. By the end of the tutorial, you would be able to run a basic MuSHR simulation in the MuJoCo environment.
Requirements
The full MuSHR stack from the Quickstart tutorial
ROS, follow the Intro to ROS tutorial for a refresher
A licensed copy of MuJoCo. Place the extracted folder
mujoco200_linuxalong with the licensemjkey.txtin the directory~/.mujoco/Cmake miminum version 3.13.2
Setup
Clone the MuSHR MuJoCo repository into your catkin workspace:
# Go to your catkin workspace
$ cd ~/catkin_ws/src
# Clone the MuSHR MuJoCo repository
$ git clone git@github.com:prl-mushr/mushr_mujoco_ros.gitNote that in CMakeLists.txt, you can specify the MuJoCo directory with
the MUJOCO_LOCATION environment variable. The default path is ~/.mujoco/. Optionally, if you want to use OpenGL for enhanced graphics,
set the USE_GL environment variable to 1, which is the default value. To
compile with GL install GLFW:
$ sudo apt-get install libglfw3-devCompile your workspace:
$ cd .. && catkin_makeRunning the Simulator
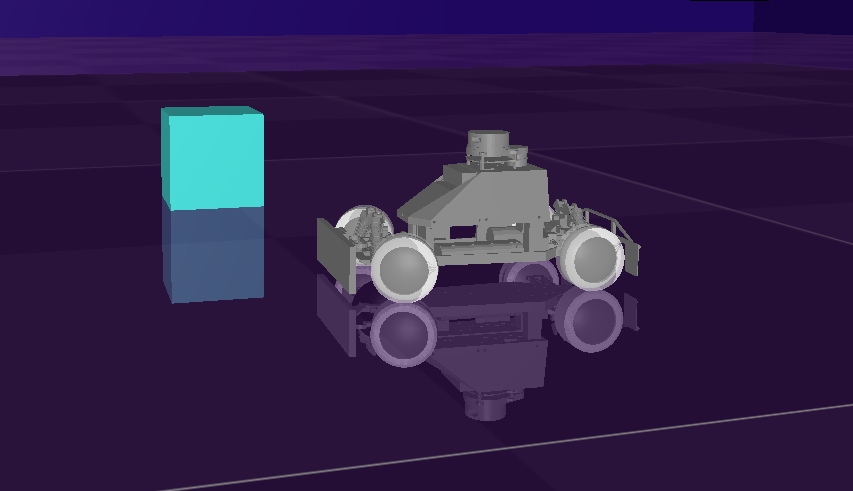
To demonstrate the MuSHR MuJoCo environment, we will run a simple simulation
of a car and a block that can be pushed. Each simulation requires a ROS launch
file, a MuJoCo model XML file, and a configuration YAML file with the same name.
Take a look at launch/block.launch, models/block.xml, and
config/block.yaml.
In the launch file, we can use a specific map file. The environment variable should match the name of the three files mentioned above:
<arg name="map_server" default="1"/>
<arg name="map_file" default="$(find mushr_mujoco_ros)/maps/empty.yaml" />
<arg name="environment" default="block" />The node parameters specify the MuJoCo key, XML file, and YAML file paths, as well as visualization. The default paths follow that in the previous step:
<node pkg="mushr_mujoco_ros" name="mushr_mujoco_ros" type="mushr_mujoco_ros_node" output="screen">
<param name="mj_key" value="~/.mujoco/mjkey.txt" />
<param name="model_file_path" value="$(find mushr_mujoco_ros)/models/$(arg environment).xml" />
<param name="config_file_path" value="$(find mushr_mujoco_ros)/config/$(arg environment).yaml" />
<param name="viz" value="true" />
</node>The model XML file contains MuJoCo constants that define the bodies and actuator parameters for the simulate car. To add a car to the simulation, use an
“include” tag with the path from the models directory:
<include file="cars/pusher_car/buddy.xml"/>The configuration YAML file is a list of bodies and cars whose position will be published to different topics. The MuSHR vehicles are listed under “cars” while
other objects are listed under “bodies”. In this simulation, the car buddy
receives the control, pose, and initpose messages on the controls, pose, and initialpose ROS topics:
cars:
- name: buddy
control_topic : control
pose_topic: pose
initpose_topic: initialposeWith a grasp of the basic structure, we can start the simulation:
$ roslaunch mushr_mujoco_ros block.launchTo control the car with WASD keyboard input, open another terminal. Enter the line below, replacing the name of the car as needed:
$ rosrun topic_tools relay /mux/ackermann_cmd_mux/input/teleop /mushr_mujoco_ros/buddy/controlExperimenting with MuJoCo
Try to drive the car around and push the block. You might notice that it’s
somewhat difficult to push the block with precision. Let’s change the MuJoCo
model parameters to facilitate our task. Open models/block.xml and find
the body tag that describes the block. Double the mass to “2.4”, and increase
the size to “0.1 0.1 0.1”, which should provide a larger block to push. Increase
the friction on the block by setting friction to be “0.8 0.05 0.001”. The 3 values
control tangential, torsional, and rolling friction, respectively. Feel free to
mess around with the values for a desired result.
<body pos="1.000000 0.000000 0.049" name="block" euler="0 0 0.000000">
<joint type="free"/>
<geom type="box" mass="2.4" contype="1" friction="0.8 0.05 0.001"
conaffinity="1" size="0.1 0.1 0.1" rgba="0.247 0.772 0.760 1"/>
</body>After changing model parameters, remember to recompile the workspace with
catkin_make for the changes to take effect. Have fun with MuJoCo!
To autonomously drive figure-8s in MuJoCo, checkout the
MuJoCo Figure 8 tutorial.